Articles associés au tag ‘os’
11
Juin
2013
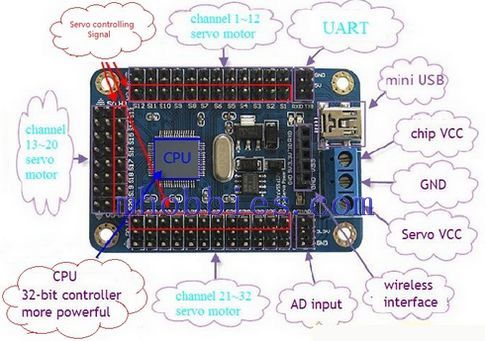
Cette carte permet de s’interfacer aux servomoteurs.
Elle fait office de carte mere.
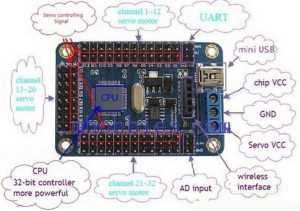
Voici les caractéristiques complètes :
Controlling MCU power supply: 6.5~12 V or 3.5~5.5V
Servos power supply: DC
Control channels: 32
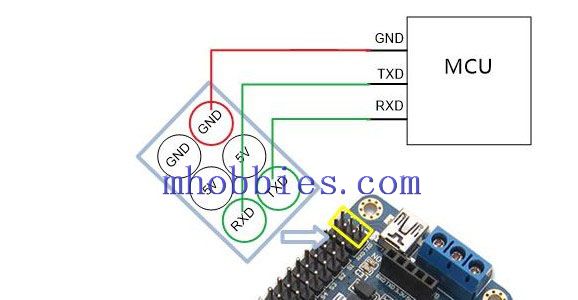
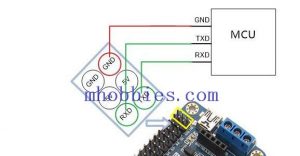
Communication Input: USB or UART (TTL or USART). (The Bluetooth or some other wireless module can be used to make the controlling).
Signal Output: PWM (Accuracy 1us).
Servo motor resolution: 1us, 0.09 degrees.
Baud Rate: 9600,19200,28400,57600,115200,128000(recognized automatically).
Servo motors supported: Futaba, Hitec or some other Servos Motor controlled by PWM.
Dimensions: 63.5mm x 43.5mm x 1.6mm.
Control mode: USB and UART (TTL) to accept command. (Comes with USB data wire and PC controlling software).
Flash memory: onboard 512K ROM (If every command is used to control the 32 motors at the same time, more than 500 commands can be saved.)
Powerful MCU
High controlling accuracy
Offline operation function
Identify baud rate automatically
Plus d’infos sur mhobbies.com
4-Carte Controller, Bender Project | Pas de commentaire » | Tags : arduino, capteur, domotique, hardware, modules, o, os, raspberry, servo, servomoteur, x
11
Juin
2013
6-Modules, Bender Project | Pas de commentaire » | Tags : arduino, audio, capteur, domotique, hardware, modules, o, os, raspberry, servo, servomoteur, x
11
Juin
2013
Les servomoteurs fournit avec notre exosqquelette sont des TowerPro G995.
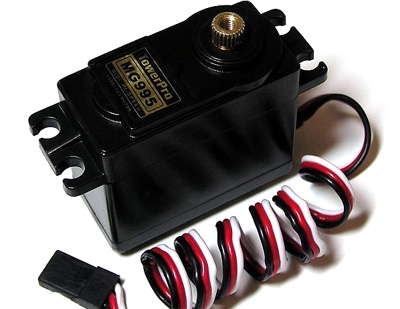
Ils ont un couple de 13kg/cm ce qui est plus que raisonable :)
Si mes calculs sont mathématiques, alors la bebête devrait pouvoir se tenir sur ses deux pattes arrière !!
3-Servomoteurs, Bender Project | 2 commentaires » | Tags : arduino, capteur, domotique, modules, o, os, servo, servomoteur, x
11
Juin
2013
Nous avons fait le choix de prendre un kit exosquelette + servomoteur (rendant le tout moins cher) pour commencer.
Notre choix s’est porté sur ce modèle qui à un excellent rapport qualité/prix :
Arduino Alumin Hexapod Spider 6 3DOF Legs Robot + 18 Servos + 32CH Servo Controller
Nous trouvons plus de détails sur le site mhobbies
C’est un exosquelette 3DOF (3 degree of freedom) 3 servomoteur par patte :

2-Exosquelette, Bender Project | Pas de commentaire » | Tags : arduino, capteur, domotique, exosquelette, modules, o, os, servo, servomoteur, x
11
Juin
2013
Le projet Bleuet concerne deux personnages atipiques (Dev & Archi) se lançant dans la construction d’un hexapod

Voici les différentes parties qui seront abordés :
A-L’exosquelette
B-Les servomoteurs
C-La carte contrôleur (Ou les servomoteurs seront connectés)
D-Différents capteurs (Camera, détection de présence …)
E-L’informatique embarqué (ou pas)
F-Divers modules (Bluetooth, wifi, GPS …)
Le tout sera agrémenté de photos-videos vous permettant de vous lancer dans la construction de votre propre robot !!
A vos outils, prêt, partez !!
1-Introduction, Bender Project | Pas de commentaire » | Tags : arduino, capteur, domotique, exosquelette, modules, o, os, servo, servomoteur, video, x
27
Mai
2013
Voici l’XML de commande qui permet d’appeler un preset SmoothStreaming RHOZET pour transcoder 2 sources (Par ex un panneau CSA et le film) contient deux langues audio et un sous-titre.
<?xml version="1.0" encoding="UTF-8"?>
<cnpsXML ProjectID.DWD="161428257" CreatedByAppVersion="3.21.5">
<Sources>
<Module_0 Inpoint.QWD="-1" Outpoint.QWD="-1" MultiSource.DWD="1">
<ModuleData>
<StreamTypeTable StreamSelector_0.DWD="0" StreamType_0.DWD="0" StreamPtr_0.DWD="0" StreamSelector_1.DWD="2" StreamType_1.DWD="0" StreamPtr_1.DWD="0"/>
<SourceModules>
<MultiSrcModule_0 MultiSource.DWD="0" Filename="\192.168.10.31transcodageFILMOLINELOGO_CSA-12.wmv" FullUNCFilename="\192.168.10.31transcodageFILMOLINELOGO_CSA-12.wmv"/>
</SourceModules>
</ModuleData>
<Filter_0/>
<Filter_1/>
</Module_0>
<Module_1 Inpoint.QWD="-1" Outpoint.QWD="-1" MultiSource.DWD="1">
<ModuleData>
<StreamTypeTable StreamSelector_0.DWD="0" StreamType_0.DWD="0" StreamPtr_0.DWD="0" StreamSelector_1.DWD="2" StreamType_1.DWD="0" StreamPtr_1.DWD="0"/>
<SourceModules>
<MultiSrcModule_0 MultiSource.DWD="0" Filename="\192.168.10.31transcodageFILMOLINE\/LABO/VectraCom/8478___Familyfilms_Entre_les_jambes_vm_mezz.mpg" FullUNCFilename="\192.168.10.31transcodageFILMOLINE\/LABO/VectraCom/8478___Familyfilms_Entre_les_jambes_vm_mezz.mpg"/>
</SourceModules>
</ModuleData>
<Filter_0/>
<Filter_1/>
</Module_1>
</Sources>
<Destinations>
<Module_0 ModuleGUID="{269DF7D3-F4B5-41DB-85F7-A5A42B7A6449}" PresetGUID="{269DF7D3-F4B5-41DB-85F7-A5A42B7A6449}">
<ModuleData CML_P_BaseFileName="8478___Familyfilms_Entre_les_jambes_vm_mezz" CML_P_Path="\10.95.167.32transcodageFILMOLINEDRM_INRHOZET_OUTYacast_VM_SMOOTH" DestFileUseSource.DWD="1" general_23_assetDirectory.DWD="0" general_23_publishMode.DWD="0" general_23_vodStreamName="" general_23_vodServerManifestName="" general_23_vodClientManifestName="" debug_23_dumpElmStream.DWD="0" debug_23_dumpGraph.DWD="0" debug_23_tracePipeline.DWD="0" debug_23_fragmentorLogging.DWD="0" video_23_profile.DWD="66" video_23_frameRate.DBL="25.000002" video_23_keyFrameInterval.DBL="2.000000" video_23_useAutomaticLayerGenerator.DWD="0" video_23_automaticLayerSettings_23_maxFrameWidth.DWD="1280" video_23_automaticLayerSettings_23_maxFrameHeight.DWD="720" video_23_automaticLayerSettings_23_minFrameWidth.DWD="224" video_23_automaticLayerSettings_23_minFrameHeight.DWD="128" video_23_automaticLayerSettings_23_maxBitRate.DWD="3000" video_23_automaticLayerSettings_23_minBitRate.DWD="230" video_23_numberOfLayers.DWD="3" video_01_23_bitRate.DWD="2000" video_01_23_frameWidth.DWD="720" video_01_23_frameHeight.DWD="405" video_02_23_bitRate.DWD="800" video_02_23_frameWidth.DWD="720" video_02_23_frameHeight.DWD="405" video_03_23_bitRate.DWD="500" video_03_23_frameWidth.DWD="720" video_03_23_frameHeight.DWD="405" video_04_23_bitRate.DWD="446" video_04_23_frameWidth.DWD="432" video_04_23_frameHeight.DWD="242" video_05_23_bitRate.DWD="568" video_05_23_frameWidth.DWD="512" video_05_23_frameHeight.DWD="288" video_06_23_bitRate.DWD="723" video_06_23_frameWidth.DWD="600" video_06_23_frameHeight.DWD="338" video_07_23_bitRate.DWD="918" video_07_23_frameWidth.DWD="696" video_07_23_frameHeight.DWD="390" video_08_23_bitRate.DWD="1161" video_08_23_frameWidth.DWD="798" video_08_23_frameHeight.DWD="448" video_09_23_bitRate.DWD="1459" video_09_23_frameWidth.DWD="908" video_09_23_frameHeight.DWD="510" video_10_23_bitRate.DWD="1823" video_10_23_frameWidth.DWD="1026" video_10_23_frameHeight.DWD="405" video_11_23_bitRate.DWD="2261" video_11_23_frameWidth.DWD="1152" video_11_23_frameHeight.DWD="648" video_12_23_bitRate.DWD="2785" video_12_23_frameWidth.DWD="1288" video_12_23_frameHeight.DWD="724" video_13_23_bitRate.DWD="3407" video_13_23_frameWidth.DWD="1432" video_13_23_frameHeight.DWD="806" video_14_23_bitRate.DWD="4141" video_14_23_frameWidth.DWD="1586" video_14_23_frameHeight.DWD="892" video_15_23_bitRate.DWD="5000" video_15_23_frameWidth.DWD="1748" video_15_23_frameHeight.DWD="982" video_16_23_bitRate.DWD="6000" video_16_23_frameWidth.DWD="1920" video_16_23_frameHeight.DWD="1080" audio_23_sampleRate.DWD="44100" audio_23_numberOfAudioStreams.DWD="2" audio_01_23_language="fre" audio_01_23_channelConfiguration.DWD="2" audio_01_23_bitRate.DWD="256000" audio_02_23_language="eng" audio_02_23_channelConfiguration.DWD="2" audio_02_23_bitRate.DWD="256000" audio_03_23_language="" audio_03_23_channelConfiguration.DWD="2" audio_03_23_bitRate.DWD="128000" audio_04_23_language="" audio_04_23_channelConfiguration.DWD="2" audio_04_23_bitRate.DWD="128000" audio_05_23_language="" audio_05_23_channelConfiguration.DWD="2" audio_05_23_bitRate.DWD="128000" audio_06_23_language="" audio_06_23_channelConfiguration.DWD="2" audio_06_23_bitRate.DWD="128000" audio_07_23_language="" audio_07_23_channelConfiguration.DWD="2" audio_07_23_bitRate.DWD="128000" audio_08_23_language="" audio_08_23_channelConfiguration.DWD="2" audio_08_23_bitRate.DWD="128000" audio_09_23_language="" audio_09_23_channelConfiguration.DWD="2" audio_09_23_bitRate.DWD="128000" audio_10_23_language="" audio_10_23_channelConfiguration.DWD="2" audio_10_23_bitRate.DWD="128000" audio_11_23_language="" audio_11_23_channelConfiguration.DWD="2" audio_11_23_bitRate.DWD="128000" audio_12_23_language="" audio_12_23_channelConfiguration.DWD="2" audio_12_23_bitRate.DWD="128000" audio_13_23_language="" audio_13_23_channelConfiguration.DWD="2" audio_13_23_bitRate.DWD="128000" audio_14_23_language="" audio_14_23_channelConfiguration.DWD="2" audio_14_23_bitRate.DWD="128000" audio_15_23_language="" audio_15_23_channelConfiguration.DWD="2" audio_15_23_bitRate.DWD="128000" audio_16_23_language="" audio_16_23_channelConfiguration.DWD="2" audio_16_23_bitRate.DWD="128000" ttml_23_numberOfTtmlStreams.DWD="1" ttml_01_23_ttml_source.DWD="2" ttml_01_23_ttml_service_number.DWD="1" ttml_01_23_ttml_language="fre" ttml_01_23_ttml_file="\192.168.10.31transcodageFILMOLINESOUS-TITRES\OUT_CSASTL_FOR_DFXP8478___Familyfilms_Entre_les_jambes_vm_mezz.xml" ttml_01_23_ttml_file_offset="00:00:00.000" ttml_02_23_ttml_source.DWD="1" ttml_02_23_ttml_service_number.DWD="2" ttml_02_23_ttml_language="eng" ttml_02_23_ttml_file="" ttml_02_23_ttml_file_offset="00:00:00.000" ttml_03_23_ttml_source.DWD="1" ttml_03_23_ttml_service_number.DWD="3" ttml_03_23_ttml_language="eng" ttml_03_23_ttml_file="" ttml_03_23_ttml_file_offset="00:00:00.000" ttml_04_23_ttml_source.DWD="1" ttml_04_23_ttml_service_number.DWD="4" ttml_04_23_ttml_language="eng" ttml_04_23_ttml_file="" ttml_04_23_ttml_file_offset="00:00:00.000" ttml_05_23_ttml_source.DWD="1" ttml_05_23_ttml_service_number.DWD="5" ttml_05_23_ttml_language="eng" ttml_05_23_ttml_file="" ttml_05_23_ttml_file_offset="00:00:00.000" ttml_06_23_ttml_source.DWD="1" ttml_06_23_ttml_service_number.DWD="6" ttml_06_23_ttml_language="eng" ttml_06_23_ttml_file="" ttml_06_23_ttml_file_offset="00:00:00.000" ttml_07_23_ttml_source.DWD="1" ttml_07_23_ttml_service_number.DWD="7" ttml_07_23_ttml_language="eng" ttml_07_23_ttml_file="" ttml_07_23_ttml_file_offset="00:00:00.000" ttml_08_23_ttml_source.DWD="1" ttml_08_23_ttml_service_number.DWD="8" ttml_08_23_ttml_language="eng" ttml_08_23_ttml_file="" ttml_08_23_ttml_file_offset="00:00:00.000" ttml_09_23_ttml_source.DWD="1" ttml_09_23_ttml_service_number.DWD="9" ttml_09_23_ttml_language="eng" ttml_09_23_ttml_file="" ttml_09_23_ttml_file_offset="00:00:00.000" ttml_10_23_ttml_source.DWD="1" ttml_10_23_ttml_service_number.DWD="10" ttml_10_23_ttml_language="eng" ttml_10_23_ttml_file="" ttml_10_23_ttml_file_offset="00:00:00.000" ttml_11_23_ttml_source.DWD="1" ttml_11_23_ttml_service_number.DWD="11" ttml_11_23_ttml_language="eng" ttml_11_23_ttml_file="" ttml_11_23_ttml_file_offset="00:00:00.000" ttml_12_23_ttml_source.DWD="1" ttml_12_23_ttml_service_number.DWD="12" ttml_12_23_ttml_language="eng" ttml_12_23_ttml_file="" ttml_12_23_ttml_file_offset="00:00:00.000" ttml_13_23_ttml_source.DWD="1" ttml_13_23_ttml_service_number.DWD="13" ttml_13_23_ttml_language="eng" ttml_13_23_ttml_file="" ttml_13_23_ttml_file_offset="00:00:00.000" ttml_14_23_ttml_source.DWD="1" ttml_14_23_ttml_service_number.DWD="14" ttml_14_23_ttml_language="eng" ttml_14_23_ttml_file="" ttml_14_23_ttml_file_offset="00:00:00.000" ttml_15_23_ttml_source.DWD="1" ttml_15_23_ttml_service_number.DWD="15" ttml_15_23_ttml_language="eng" ttml_15_23_ttml_file="" ttml_15_23_ttml_file_offset="00:00:00.000" ttml_16_23_ttml_source.DWD="1" ttml_16_23_ttml_service_number.DWD="16" ttml_16_23_ttml_language="eng" ttml_16_23_ttml_file="" ttml_16_23_ttml_file_offset="00:00:00.000" CML_P_ForcedSplitMinutes.DWD="0" CML_P_SourceSegmentSel.DWD="0" CML_P_SourceSegmentStart.DWD="-1" CML_P_SourceSegmentTime.DWD="-1" CML_P_SourceSegmentStartDbl.DBL="0.000000" CML_P_SourceSegmentTimeDbl.DBL="0.000000" FullUNCPath="\10.95.167.32transcodageFILMOLINEDRM_INRHOZET_OUTYacast_VM_SMOOTH"/>
<Filter_0/>
<Filter_1/>
</Module_0>
</Destinations>
<ProjectSettings Stitching.DWD="1" TargetOverWrite.DWD="1">
<KernelFlags KP_LetterBoxParam.DWD="0" KP_MethodVideoScaleUp.DWD="0" KP_MethodVideoScaleDown.DWD="0" KP_MethodVideoScaleThreads.DWD="0" KP_MethodVideoScaleOptions.DWD="0" KP_Activelinelength704.DWD="0" KP_TCFrameRateMode.DWD="0" KP_FrameRateMode.DWD="2" KP_SpecialMPEGScaling.DWD="1" KP_SpecialDeinterlacing.DWD="1" KP_SpecialD1toDVScaling.DWD="1" KP_RGB2YUV601.DWD="1" KP_YUV2RGB601.DWD="1" KP_AdjustDurationLimit.DWD="5" KP_AdjustDurationEnabled.DWD="1" KP_RestrictQuality.DWD="0" KP_AnamorphicScalingLimit.DWD="50" KP_AnamorphicScalingLimitEnabled.DWD="1" KP_SpecialVBIScaling.DWD="1" KP_DefaultSTLanguage.DWD="0" KP_DefaultAudioLanguage.DWD="0" KP_ForceInternalMPEGDecoder.DWD="1" KP_SetChapterAtStitch.DWD="0" KP_UseDropFrame.DWD="1" KP_UseMPEGTimeStamp.DWD="0" KP_MaxMediaCut.DWD="5" KP_UseLegacyMPEG.DWD="0" KP_UseLegacyQT.DWD="0" KP_UseNTSCSafeLetterBox.DWD="0"/>
</ProjectSettings>
</cnpsXML>
Smooth Streaming, Video | Pas de commentaire » | Tags : audio, base 64, drm, GUID, h264, modules, o, os, rhozet, smil, smooth, smooth streaming, smoothstreaming, sous-titre, sous-titres, stream, streaming, subtitle, video, x, xml