Bonjour à tous,
Ce samedi matin, comme d’habitude je me suis réveillé un peu ronchon …
Car comme tous les amoureux des animaux, je me fait réveillé par la meute qui vit à la maison.
Mais ce matin là, j’ai décidé de ne pas me laisser faire, après quelques recherche sur comment manger nourrir son chat automatiquement, je suis tombé sur des distributeurs de croquettes à piles et après quelques rapides passages sur les commentaires, j’ai compris qu’en dessous de 50 euros bah c’est de la merde !
En plus ayant deux chats qui ne mangent pas au meme endroit, ça fait cher la tranquillité …
Tout ça pour balancer quelques croquettes dans un bol, je dirais meme que c’est abusé…
J’ai commencé à regarder les différents systèmes permettant de distribuer des croquettes, on peut y trouver des systèmes de cylindre avec une ouverture sur le coté, ou encore des systèmes à vis infini voir des trucs encore plus fou.
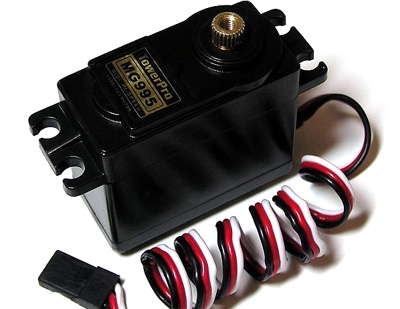
Mais j’ai craqué pour un système basé sur deux contenant et un servo moteur, le servo tourne le contenant du haut pour que l’ouverture croise celle du bas un cours instant (assez pour faire tomber quelques croquettes), cette idée je l’ai piqué sur une vidéo youtube russe dont je ne retrouve plus le lien …(promis je vais chercher).
Bon une fois le problème de distribution de croquettes réglé, il faut se pencher sur le coté connecté de l’objet.
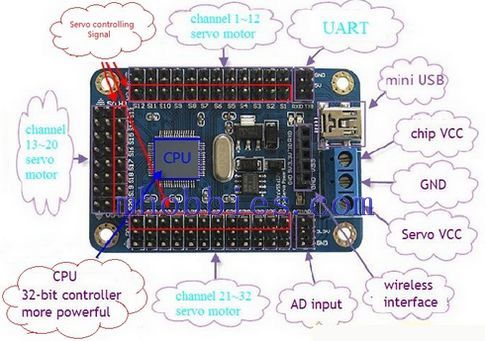
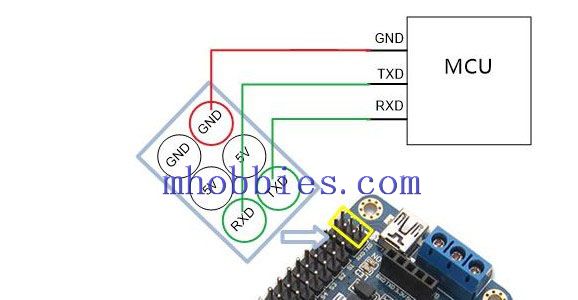
Alors là ayant en stock des ESP 8266 (ESP-12E, ce sont en gros des puces wifi que l’on peut programmer comme un arduino) je me suis dit que c’était parfait d’autant que Jeedom contient un plugin EasyESP.
Et voici ce que ça donne en vidéo :
Si vous souhaitez réaliser vous meme votre distributeur de croquettes et que vous êtes pressé, n’hésitez pas à me contacter, sinon soyez patient, un tuto complet en vidéo ne devrait pas trop tarder.
Su ce, je retournes me coucher